






 178 / 432
178 / 432

177
Том XXXXVI 2016
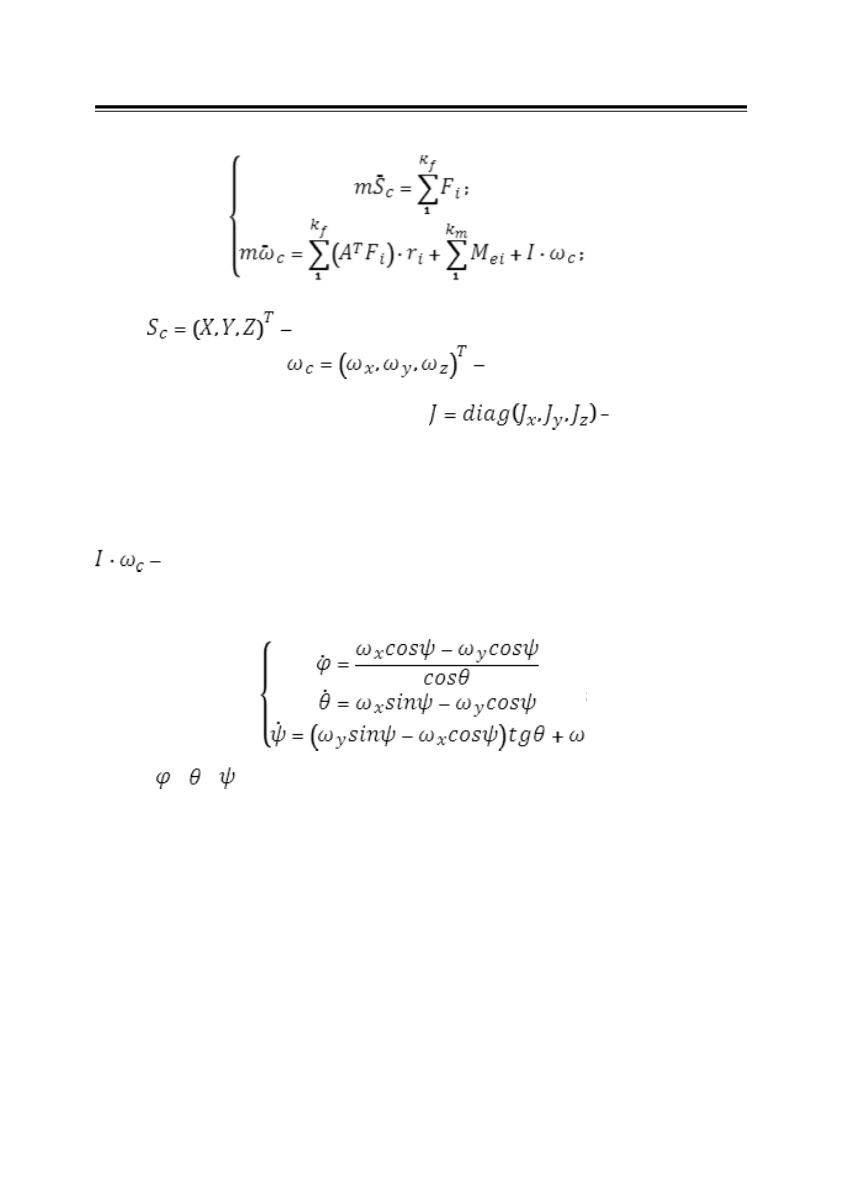
Уравнение динамики корпуса:
где
вектор координат центра масс корпуса в неподвижной
системе координат;
вектор проекции угловой
скорости корпуса на подвижную, связанную с корпусом, систему координат;
диагональная матрица масс тела;
диагональная
матрица главных центральных моментов инерции корпуса;
F
i
– трехмерный
вектор внешних сил, действующих на точку, заданный в неподвижной системе
координат;
r
i
– радиус-вектор точки приложения силы в подвижной системе
координат;
M
ei
– трехмерный вектор внешнихмоментов, действующихна точку,
заданный в подвижной системе координат;
k
m
– количество внешних моментов;
вектор моментов гироскопических сил;
I
– вектор кинетического
момента тела;
A
– ортогональная матрица поворота (ориентации).
В описании модели используются кинематические уравнения Эйлера:
где
,
,
– корабельные углы Эйлера – углы последовательных
поворотов вокруг осей x, y, z связанной с корпусом системой координат.
Матрица поворота определяется через углы:
На рис. 4 представлены графики параметров движения, полученные по
результатам моделирования динамики разгона.
Робот в автоматическом режиме с помощью системы технического зрения
и технологического адаптера с электрическим цилиндром будет подстраивать
высоту и угол модулей с навесным оборудованием под высоту растений и,
продолжая движение, вести их обработку [3, 5].
Электронная Научная СельскоХозяйственная Библиотека