






 177 / 432
177 / 432

176
ПЛОДОВОДСТВО И ЯГОДОВОДСТВО РОССИИ
ФГБНУ ВСТИСП
Во Всероссийском институте механизации (ВИМ) активно ведутся работы
по обоснованию технологического применения и разработки интеллектуаль-
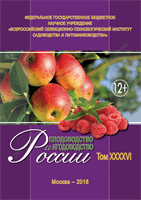
ных машин для садоводства [1, 2, 4]. Разрабатываемый робот для садоводства
оснащается системой технического зрения и различными модулями для об-
работки садовых растений (рис. 2).
а)
б) в)
г)
Рис. 2. Роботы для садоводства с различными модулями:
а) модуль «Лазерный облучатель растений»; б) модуль «Мониторинг урожайности»;
в) модуль «Опрыскиватель-гербицидник»;
г) модуль «Магнитно-импульсная обработка растений»
Анализ подвижности модели робота на основе имитационного матема-
тического моделирования демонстрирует модели динамического поведения
корпуса робота при различных режимах движения в условиях агрофона мно-
голетних насаждений. Исходными данными для расчёта выступают: масса
m=153 кг
, номинальная мощность тягового двигателя
N
e
=5148 Вт
, моменты
инерции, относительно осей х, y, z,
J
x
= 93,26
;
J
y
=284,4
;
J
y
= 341,4 кг·м
2
;
ра-
диус колеса r = 0,3 м.
В программном комплексе многотельного проектирования математическая
модель робота представлена в виде совокупности тел с различными упруго-
демпфирующими характеристиками. Данный метод позволяет на этапе про-
ектирования провести оптимизацию конструктивных параметров.
Рис. 3. Модель корпуса
Электронная Н учная СельскоХозяйственная Библиотека