





 46 / 192
46 / 192

— 21 —
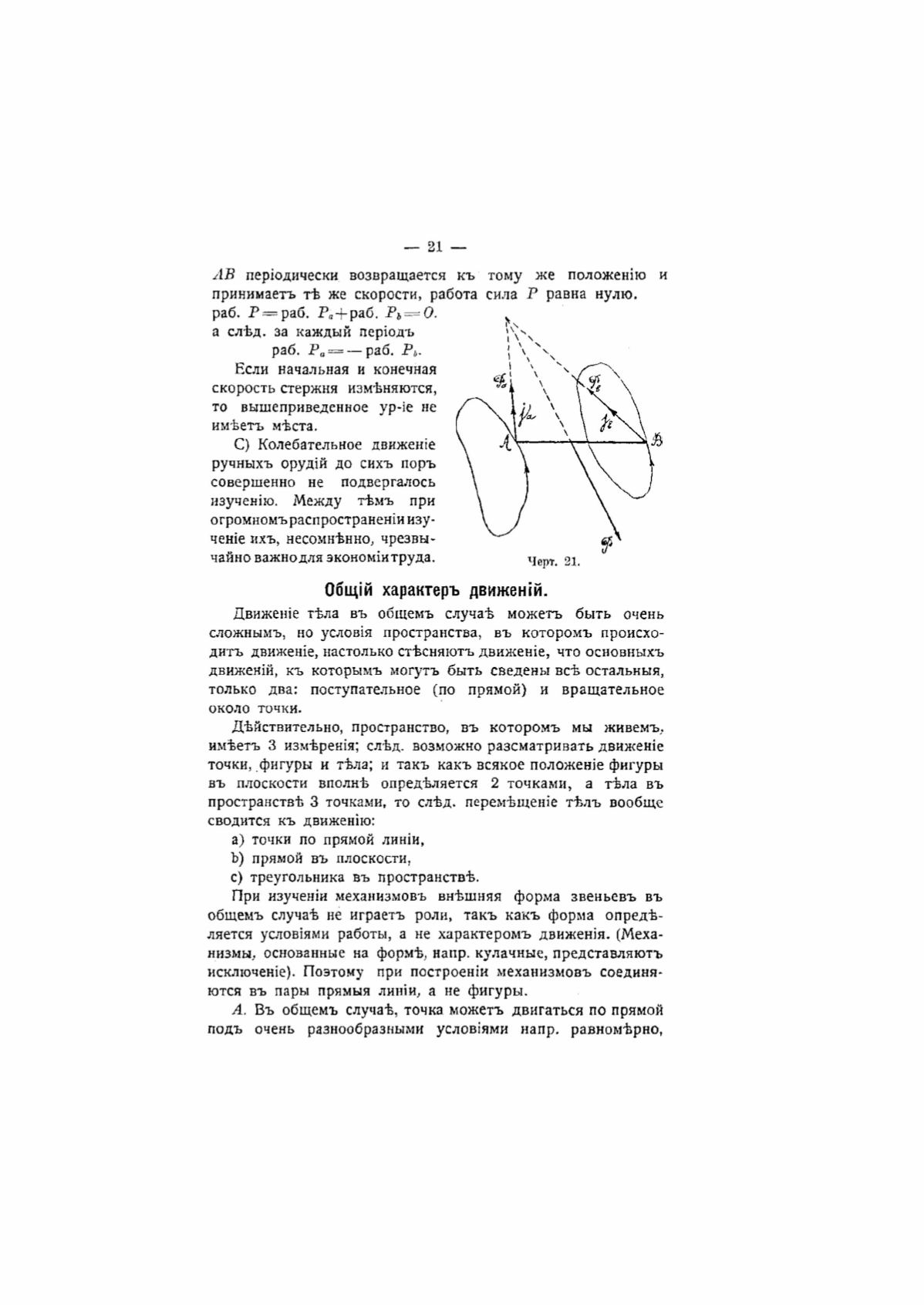
АВ
перюдически возвращается къ тому же положенно и
принимаетъ т е же скорости, работа сила Р равна нулю,
раб. Р = раб. Р„+раб.
Р ь= 0.
а след. за каждый перюдъ
раб. Р„ = — раб.
Р„.
Если начальная и конечная
скорость стержня изменяются,
то вышеприведенное yp-ie не
им-Ьетъ места.
С) Колебательное движете
ручныхъ орудш до сихъ поръ
совершенно не подвергалось
изученш. Между темъ при
огромномъ распространен^ изу-
чеше ихъ, несомненно, чрезвы
чайно важнодля экономштруда.
0бщ1 й характеръ движений.
Движете тела въ общемъ случае можегь быть очень
сложнымъ, но услов
1
я пространства, въ которомъ происхо
дить движете, настолько стесняютъ движ ете, что основныхъ
движенш, къ которымъ могутъ быть сведены все остальныя,
только два: поступательное (по прямой) и вращательное
около точки.
Действительно, пространство, въ которомъ мы живемъ,
имеетъ 3 измерешя; след, возможно разсматривать движете
точки, фигуры и тела; и такъ какъ всякое положеше фигуры
въ плоскости вполне определяется
2
точками, а тела въ
пространстве 3 точками, то след, перемещеше тЬлъ вообще
сводится къ движенш:
a) точки по прямой линш,
b
) прямой въ плоскости,
c) треугольника въ пространстве.
При изученш механизмовъ внешняя форма звеньевъ въ
общемъ случае не играетъ роли, такъ какъ форма опреде
ляется услов1ями работы, а не характеромъ движешя. (Меха
низмы, основанные на форме, напр. кулачные, представляютъ
исключеше). Поэтому при построении механизмовъ соединя
ются въ пары прямыя лиши, а не фигуры.
А.
Въ общемъ случае, точка можетъ двигаться по прямой
подъ очень разнообразными услов
1
ями напр. равномерно,
Научная электронная библиотека ЦНСХБ