





 114 / 192
114 / 192

— 89 —
небречь вследств
1
е ничтожной массы звеньевъ, какъ это,
несомненно, имЪетъ место во многихъ случаяхъ напр. для
соломотрясовъ, грохотовъ и т. д., масса которыхъ преобла
даете надъ массами подв-Ьсокъ и коленчатаго вала. Въ этихъ
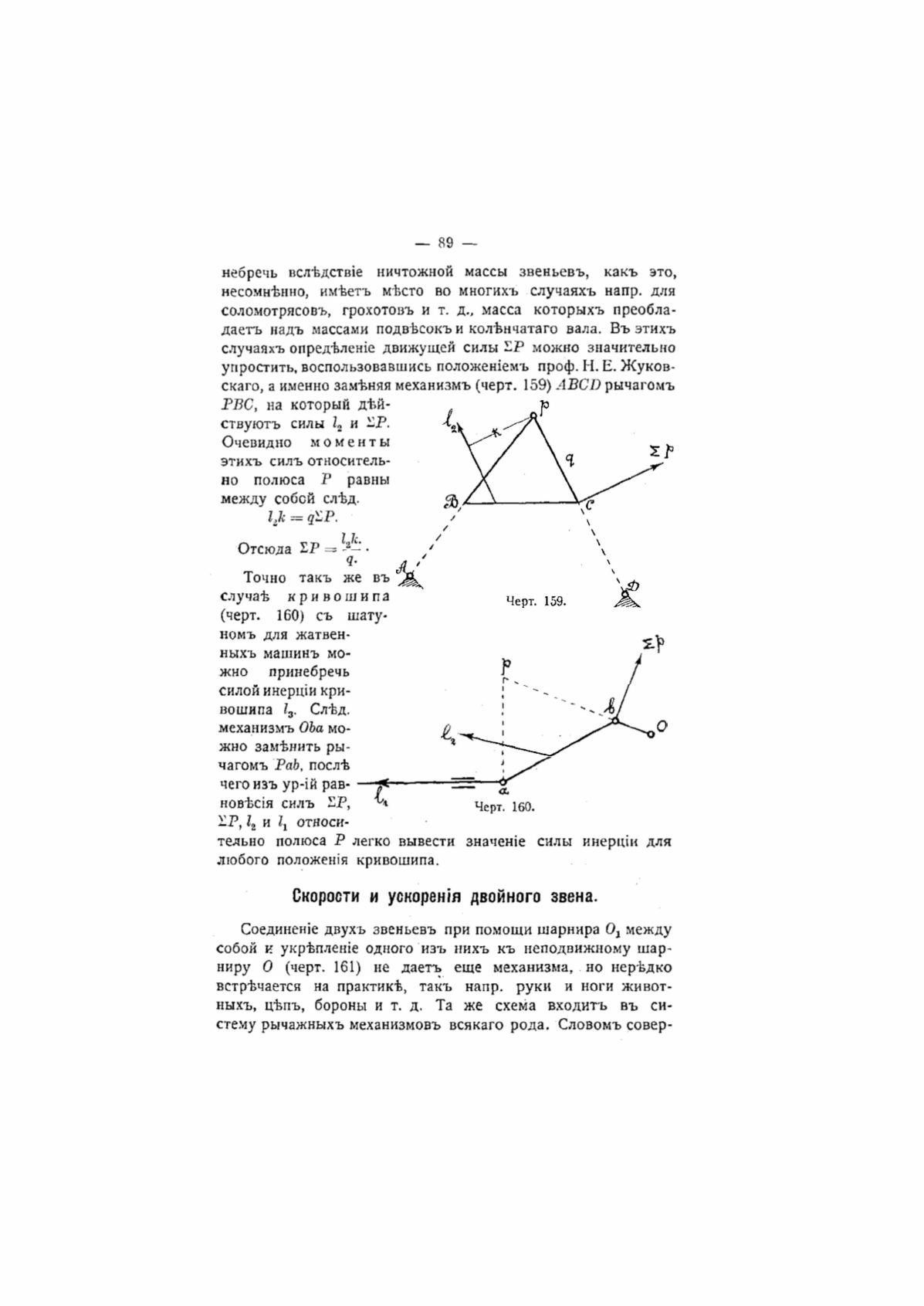
случаяхъ определеше движущей силы ЕР можно значительно
упростить, воспользовавшись положешемъ проф. Н. Е. Жуков-
скаго, а именно заменяя механизмъ (черт, 159)
ABCD
рычагомъ
ВВС,
на который дей-
ствуютъ силы
U
и ЕР.
Очевидно м о м е н ты
этихъ силъ относитель
но полюса Р равны
между собой след.
lik = q Z P .
Отсюда ЕР =
•
?•
Точно такъ же въ
случае к р и в о ш и п а
(черт. 160) съ шату-
номъ для жатвен-
ныхъ машинъ мо
жно принебречь
силой инерщи кри
вошипа
13.
След,
механизмъ
ОЬа
мо
жно заменить ры
чагомъ
РаЪ,
после
чегоизъ ур-Ш рав-
— ^ г
новес1я силъ ЕР,
Pi
qepT leg.
ЕР,
12
и
относи
тельно полюса Р легко вывести значеше силы инерщи для
любого положешя кривошипа.
Скорости и усноренш двойного звена.
Соединеше двухъ звеньевъ при помощи шарнира
Ог
между
собой и укреплеше одного изъ нихъ къ неподвижному шар
ниру
0
(черт. 161) не даетъ еще механизма, но нередко
встречается на практике, такъ напр. руки и ноги живот-
ныхъ, цепь, бороны и т. д. Та же схема входить въ си
стему рычажныхъ механизмовъ всякаго рода, Словомъ совер-
Г
t
Научная электронная библиотека ЦНСХБ