







 32 / 238
32 / 238

107
Перемещение корма осуществляется по нормали к эвольвенте прессу-
ющего зуба. В этом же направлении действует вектор силы сжатия. Радиаль-
ное направление О
1
А (рисунок 2.6) не совпадает с действующей силой. По-
этому работа сил сжатия будет равна:
х P х РА
соs
.
(2.45)
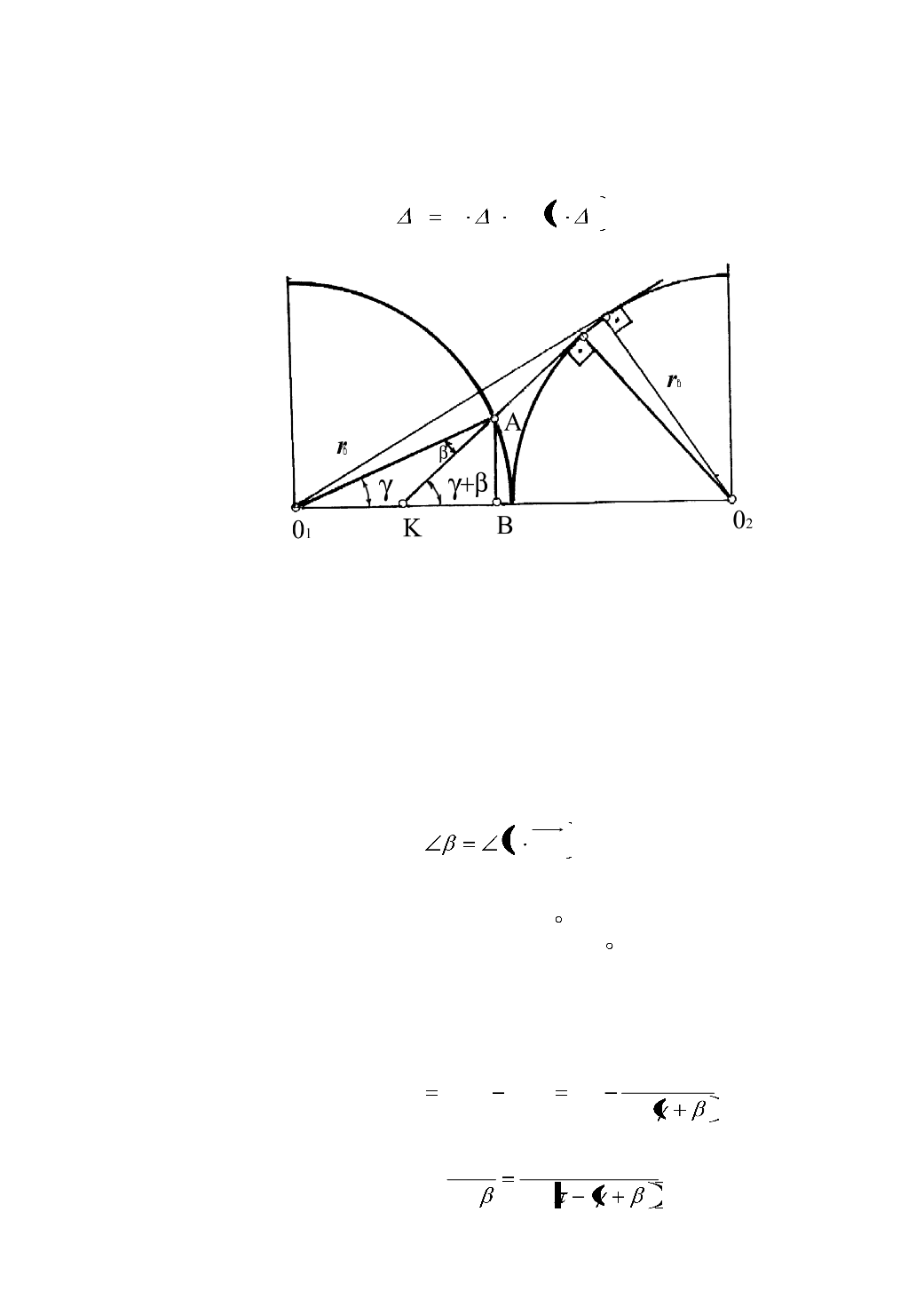
Рисунок 2.6 – Схема к определению угла наклона канала прессования
Если определен угол начала проталкивания корма в канал прессования,
то всегда можно создать условия для совпадения вектора силы с направлени-
ем перемещения. При этом наклон канала прессования к радиальному
направлению определяется направлением касательной из центра канала прес-
сования к основной окружности сопряженного колеса. Это объясняется тем,
что эволютой (геометрическим местом центра кривизны) для эвольвентного
профиля боковой поверхности зуба является основная окружность зубчатого
колеса [97].
Следовательно, угол
β
должен быть равен:
АОР
.
(2.46)
Исходное соотношение для определения угла наклона канала прессо-
вания к радиальному направлению представлено на рисунке 2.6.
Рассмотрим положение в диапазоне 30 ≤
γ
≤
0
. Выбрано исходное по-
ложение радиуса во впадине между зубьями за 30 до прохождения межцен-
тровой линии, потому что в этот момент радиус во впадине совпадает с каса-
тельной к основной окружности сопряженного колеса. В дальнейшем угол
γ
уменьшается до нуля в момент прохождения межцентровой линии.
Соотношение рассматриваемых отрезков по рисунку 2.6 равно:
sin
2
2
2 1
1
b
b
r
r КОООКО
. (2.47)
Из треугольника О
1
АК по теореме синусов:
sin
sin
1
b
r
КО
.
(2.48)
Электронная Научная СельскоХозяйственная Библиотека