






 219 / 392
219 / 392

На схеме представлена управляемая система, имеющая п вхо
дов xi( х2 ... хп, ш выходов уь у2... ут и L возмущающих воздей
ствий
Zb Z
2
. . .ZL.
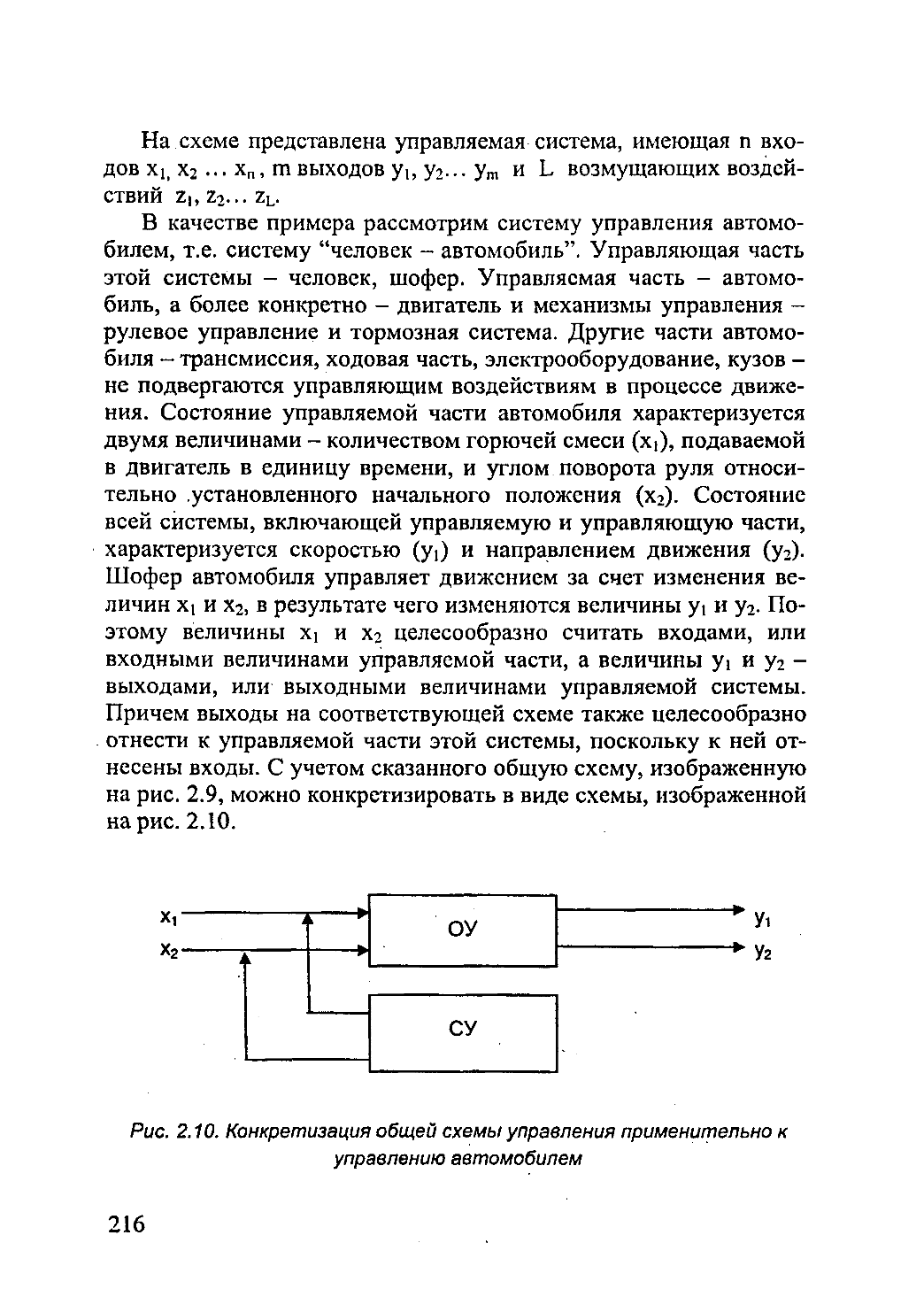
В качестве примера рассмотрим систему управления автомо
билем, т.е. систему “человек - автомобиль”. Управляющая часть
этой системы - человек, шофер. Управляемая часть - автомо
биль, а более конкретно - двигатель и механизмы управления -
рулевое управление и тормозная система. Другие части автомо
биля —трансмиссия, ходовая часть, электрооборудование, кузов -
не подвергаются управляющим воздействиям в процессе движе
ния. Состояние управляемой части автомобиля характеризуется
двумя величинами - количеством горючей смеси (xt), подаваемой
в двигатель в единицу времени, и углом поворота руля относи
тельно установленного начального положения (х2). Состояние
всей системы, включающей управляемую и управляющую части,
характеризуется скоростью (уО и направлением движения (у2).
Шофер автомобиля управляет движением за счет изменения ве
личин Xi и х2, в результате чего изменяются величины
у {
и у2. По
этому величины X! и х
2
целесообразно считать входами, или
входными величинами управляемой части, а величины yi и у
2
-
выходами, или выходными величинами управляемой системы.
Причем выходы на соответствующей схеме также целесообразно
отнести к управляемой части этой системы, поскольку к ней от
несены входы. С учетом сказанного общую схему, изображенную
на рис. 2.9, можно конкретизировать в виде схемы, изображенной
на рис.
2
.
1 0
.
Xi
х2
ОУ
к
k
W
к
СУ
У1
У2
Рис. 2.10. Конкрет изация общ ей схемы управления применит ельно к
управлению авт омобилем
216
Научная Электро ная СельскоХозяйственная Библиотека