






 143 / 392
143 / 392

Р(р>
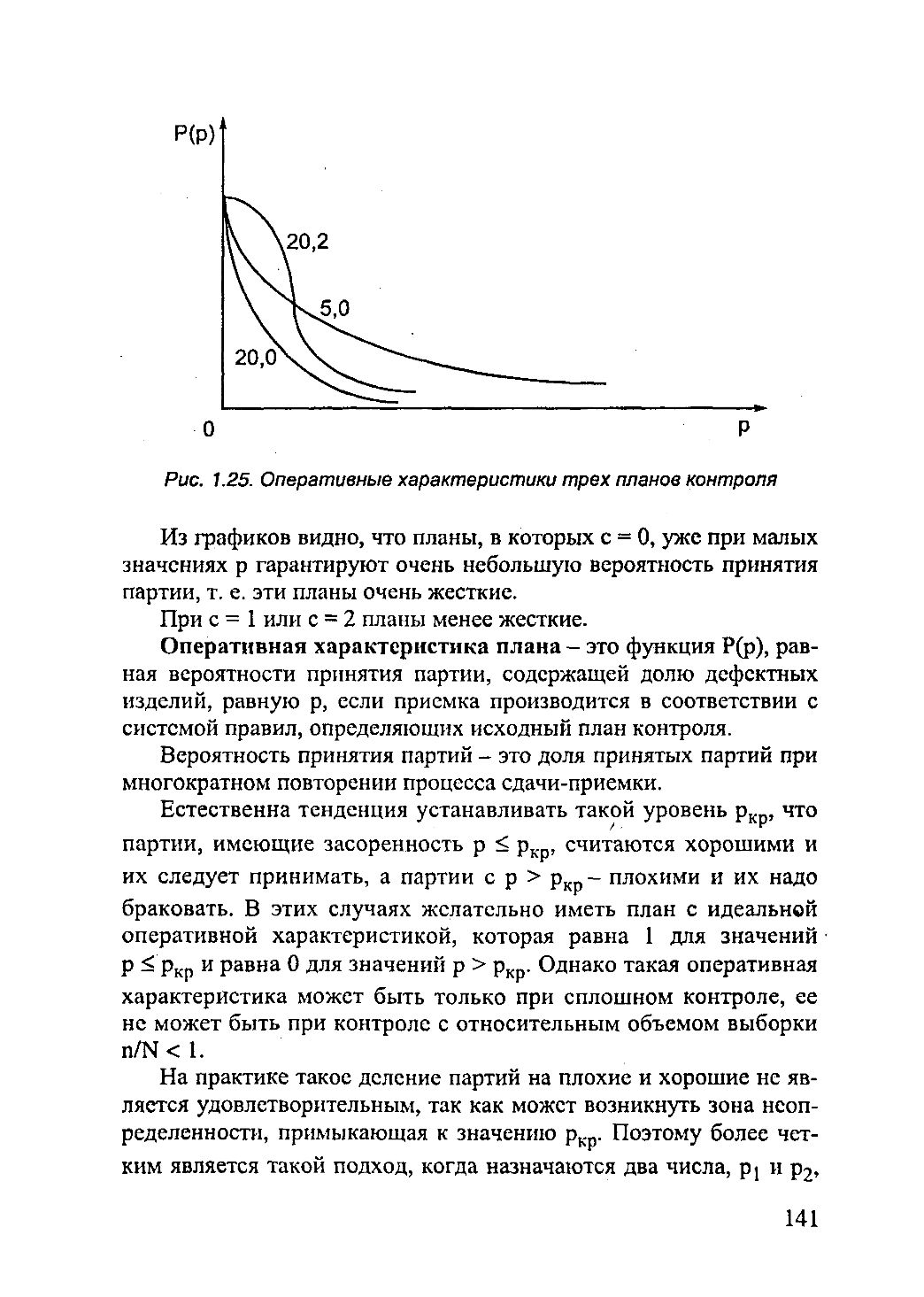
Рис. 1.25. Оперативные характ ерист ики т рех планов контроля
Из графиков видно, что планы, в которых с = О, уже при малых
значениях р гарантируют очень небольшую вероятность принятия
партии, т. е. эти планы очень жесткие.
При с = 1 или с = 2 планы менее жесткие.
Оперативная характеристика плана - это функция Р(р), рав
ная вероятности принятия партии, содержащей долю дефектных
изделий, равную р, если приемка производится в соответствии с
системой правил, определяющих исходный план контроля.
Вероятность принятия партий - это доля принятых партий при
многократном повторении процесса сдачи-приемки.
Естественна тенденция устанавливать такой уровень ркр, что
партии, имеющие засоренность р < ркр, считаются хорошими и
их следует принимать, а партии с р > ркр - плохими и их надо
браковать. В этих случаях желательно иметь план с идеальной
оперативной характеристикой, которая равна
1
для значений
р < ркр и равна 0 для значений р > ркр. Однако такая оперативная
характеристика может быть только при сплошном контроле, ее
не может быть при контроле с относительным объемом выборки
n/N < 1.
На практике такое деление партий на плохие и хорошие не яв
ляется удовлетворительным, так как может возникнуть зона неоп
ределенности, примыкающая к значению ркр. Поэтому более чет
ким является такой подход, когда назначаются два числа, pj и р2,
141
Научная Электронная СельскоХозяйственная Библиотека