





 63 / 192
63 / 192

— 38 —
Этотъ способъ представляетъ неудобство только въ томъ
отношенш, что въ большинства случаевъ полюсь слишкомъ
отдаленъ или даже выходить изъ предЬловъ чертежа. Но
это затруднеше сравнительно легко обойти, т.-к. вспомога-
ши черезъ] недоступныя точки, положеше которыхъ опре
деляется пересЪчешемъ двухъ прямыхъ линш вне чертежа.
Но тЪмъ не менЪе это во всякомъ случай связано со мно
гими неудобствами. Поэтому нередко применяются различ-
наго рода геометричесюя толковашя, который приводить
иногда къ простымъ соотношешямъ. Напр. въ механизме
кривошипа и шатуна (черт. 74), очевидно,
v РЬ^ас'
iv Pc ah.
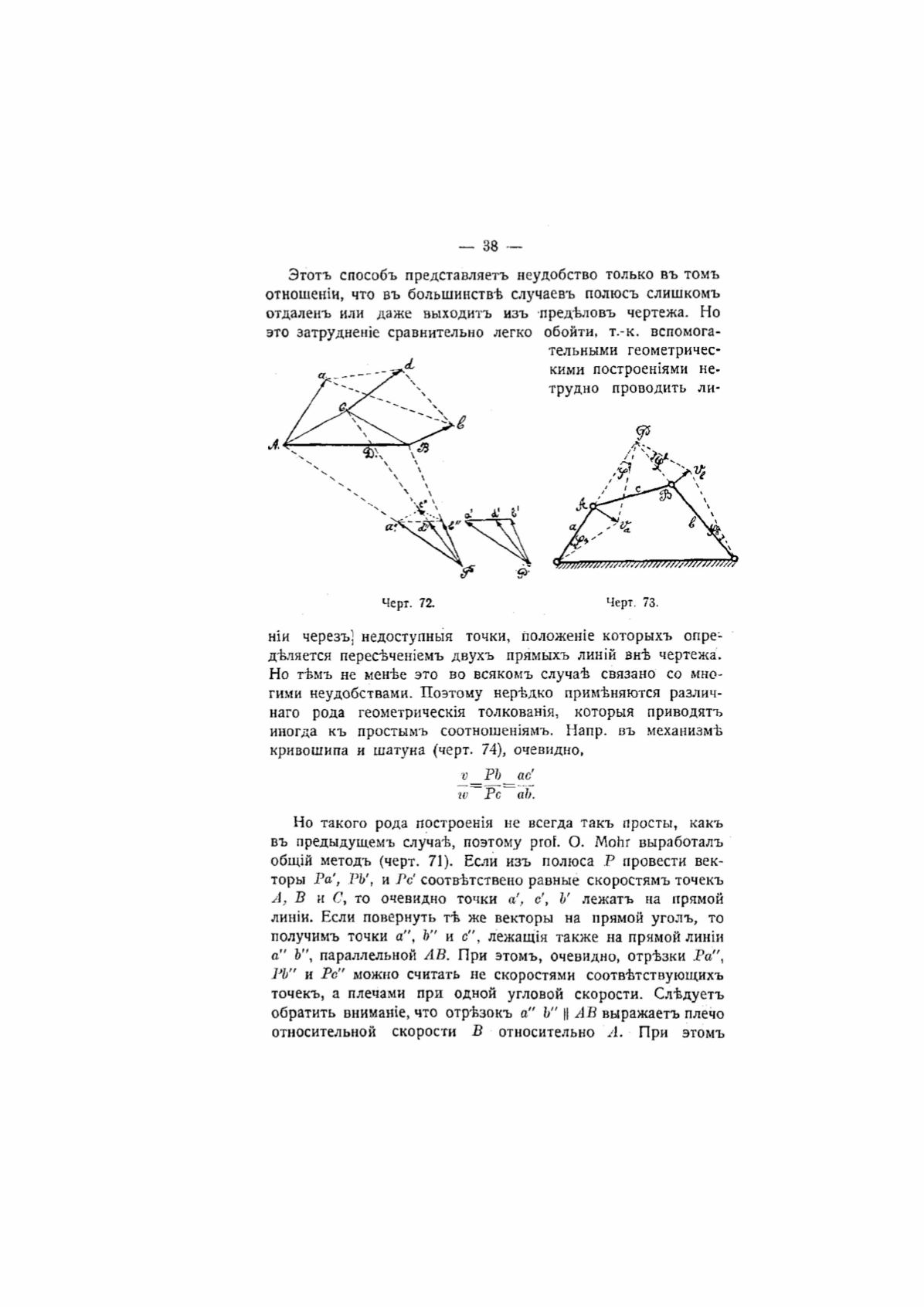
Но такого рода построения не всегда такъ просты, какъ
въ предыдущемъ случае, поэтому prof. О. Mohr выработалъ
общШ методъ (черт. 71). Если изъ полюса Р провести век
торы
Ра', РЪ',
и
Рс
соответствено равные скоростямъ точекъ
А, В
и
С,
то очевидно точки
а', с', V
лежать на прямой
линш. Если повернуть те же векторы на прямой уголъ, то
получимъ точки а",
Ь"
и
с"
, лежащ
1
я также на прямой линш
а" Ь",
параллельной
ЛВ.
При этомъ, очевидно, отрезки Ра",
РЪ"
и
Рс"
можно считать не скоростями соответствующихъ
точекъ, а плечами при одной угловой скорости. Следуетъ
обратить внимаше, что отрезокъ
а" Ь"
(|
АВ
выражаетъ плечо
относительной скорости
В
относительно
А.
При этомъ
Научная электронная библиотека ЦНСХБ