







 137 / 184
137 / 184

Научный журнал Российского НИИ проблем мелиорации, № 3(11), 2013 г., [125-133]
5
th z
t
ry
t
rx
π2
ωsin
ω cos
,
(6)
где
ω
– угловая скорость вращения шнека;
t
– некоторый момент времени за который точка
a
повернется вокруг
оси
О Z
на угол
и переместится в положение
a
.
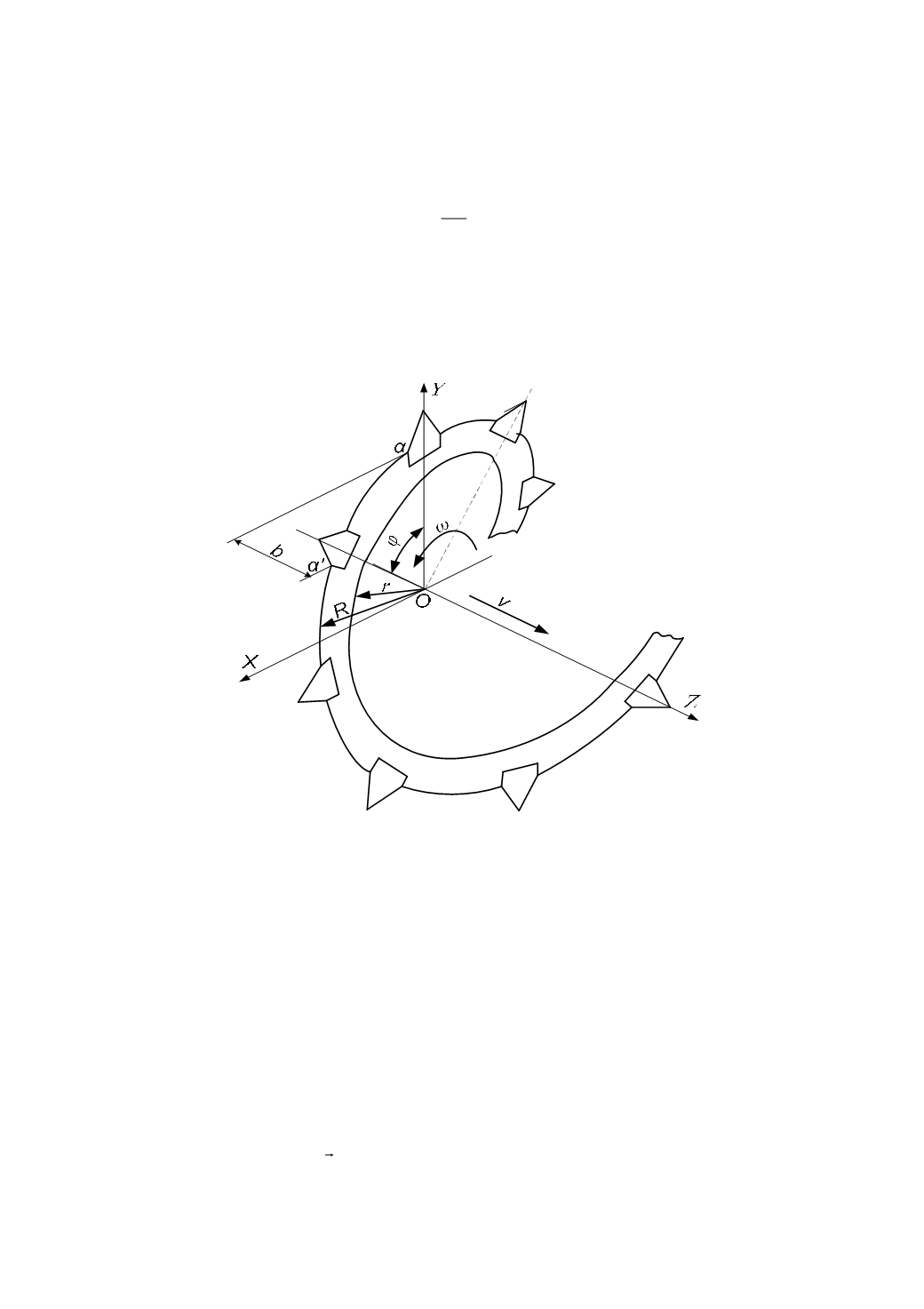
Рисунок 4 – Схема одного витка ШРА
для расчета геометрических параметров
Проекции винтовой линии на координатные плоскости:
- на плоскость
Y O X
:
2
2
2
r y x
– окружность;
- на плоскость
Y O Z
:
bz r y
/
sin
– синусоида;
- на плоскость
X O Z
:
bz rx
/
cos
– синусоида.
Регулярная кривая
l
класса
3
С
евклидова пространства
3
E
в произ-
вольной параметризации описывается векторной функцией [3]:
R I t
tz ty tx tr
), ( ), ( ), ( )(
.
(7)
Электронная Научная СельскоХозяйственная Библиотека