







 215 / 238
215 / 238

289
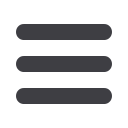
Рисунок 6.9 – Номограмма определения угла захвата корма рабочим органом
шестерѐнного пресса формующего типа
Анализ уравнения (6.39) и данные номограммы (рисунок 6.9) показы-
вают высокую захватывающую способность рабочего органа, превышающую
угол захвата гладкими вальцами без конвейера камер прессования. Результа-
ты исследований захватывающей способности справедливы для различных
вариантов конструктивных размеров пресса, так как аргументами функции
выступают критерии подобия [35].
6.4.3 Результаты оптимизации режима работы пресса
Энергоемкость брикетирования
Y
1
люцерновой резки и крошимость
брикетов
Y
2
описываются соответственно следующими регрессионными
уравнениями:
Y
1
=5,0exp(0,4077+0,3837x
1
-0,0204x
2
+0,0017x
1
x
2
+0,0051x
1
2
-0,0070x
2
2
)
, (6.43)
Y
2
=15,5328-4,8167x
1
+1,75x
2
-0,725x
1
x
2
-0,1489x
1
2
-0,1488x
2
2
.
(6.44)
Пределы изменения степени сжатия (
x
1
) и частоты вращения прессую-
щих колес (
x
2
) выбраны на основе предыдущих опытов.
Выражение (6.43) показывает, что увеличение первого фактора приводит к
значительному повышению энергоемкости, что подтверждает теоретические
предпосылки о преобладающем влиянии степени сжатия.
Электронная Научная СельскоХозяйственная Библиотека