







 78 / 84
78 / 84

Аграрная наука Евро-Северо-Востока, № 5 (42), 2014 г.
75
УДК: 633.63.631:531.2
Теоретическое обоснование динамики колесного лункоделателя
Владимир Иванович Сербин
, доктор техн. наук, доцент, зав. кафедрой
Государственный аграрный университет Молдовы, г. Кишинев,
Республика Молдова
E-mail:
v.serbin@uasm.mdВ статье изложены теоретические основы динамики посевной секции колесного типа. Выявлены
факторы, влияющие на равномерность хода колесного лункообразователя. Возможны две качественно раз-
личные динамические схемы качения колесного лункоделателя: первая - с почвой взаимодействует только
один из всех установленных на колесе лункоделателей, вторая, когда во взаимодействии состоит одновре-
менно не менее двух лункоделателей. При этом прикладное преимущество принадлежит второй схеме.
Аналитическими методами получены математические модели, выражающие зависимость скольжения
колеса от технологических и конструктивных факторов исследуемого объекта, включающих, в частно-
сти, осевую нагрузку, радиус колеса, параметры лункоделателей и скорость движения.
Ключевые слова:
колесный лункоделатель, осевая нагрузка на колесо, длина лункоделателя, пиковое
скольжение,
оптимальная нагрузка, реакция почвы, угловое ускорение колеса, равномерность вращения ко-
леса, фоновое сопротивление качению
Как известно из литературных источ-
ников, возможно построение различных схем
колесно-лунковых сеялок. Их наиболее про-
стые варианты можно представить в виде ко-
леса, получающего вращение от сцепления
его обода с почвой, ротора, вращающегося за
счет его специальных почвозацепов, ротора с
комбинированной передачей вращения, когда
сцепление ротора с почвой сочетается с при-
водом от опорно-несущих колес рамы сеялки.
Сопоставление этих схем показывает,
что для получения данных, необходимых для
практических выводов и обобщений, доста-
точно ограничиться исследованиями динами-
ческих процессов колесного варианта сеялки.
При этом важно получить данные о тяговом
сопротивлении колесных лункоделателей,
сведения о закономерностях скольжения ко-
лес в зависимости от приложенных к ним
осевых нагрузок, а также информацию о
влиянии других факторов на технологические
показатели работы заделывающих органов.
Цель исследований
– аналитическими
методами получить математическую модель,
определяющую технологические и конст-
руктивные параметры динамики колесного
лункоделателя.
Результаты и их обсуждение
.
Для
решения уравнения движения лункоделаю-
щего колеса воспользуемся схемой прило-
жения к катящемуся колесу сил, принятой в
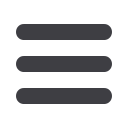
общей механике [1, 2, 3, 4, 5]. На рисунке 1
показана фаза заглубления лункообразова-
теля в почву, когда приложенные к его на-
конечнику составляющие реакции почвы
Q
и
T
оказывают на колесо тормозящее воздей-
ствие. При определенных условиях сила
Т
может менять свое направление на противо-
положное. В фазе заглубления это возможно
в том случае, если сила трения
F
Т
, возни-
кающая при соприкосновении обода колеса с
почвой, недостаточна для преодоления мо-
мента реакции почвы, действующей на нако-
нечник. Очевидно, что при выглублении лун-
кообразователя сила
Т
всегда будет направ-
лена против движения центра колеса.
Рис. 1.
Силы, действующие
на колесный лункообразователь
В этой фазе лункоделатель начинает ра-
ботать как почвозацеп, создающий момент
вращения колеса. В зависимости от количест-
ва размещенных на колесе лункоделателей
возможны две динамические схемы качения:
первая, когда с почвой взаимодействует толь-
ко один лункообразователь, вторая – не менее
двух лункообразователей, у которых силы ре-
акции
Т
противоположно направлены и час-
тично или полностью взаимоуравновешены.
Согласно рисунку 1, граничное число
лункоделателей, разделяющее первую и вто-
Электронная Научная СельскоХозяйственная Библиотека