







 170 / 238
170 / 238

245
(R – r)/sinγ = r/sinα, (5.17)
откуда искомый угол
γ =
arcsin
[(R – r)
sin
α/r]
.
Текущее значение его:
γ =
arcsin
[(R – r)
sin
(α-ωt)/r]
. (5.18)
Значение этого угла изменяется, во-первых, от величины относитель-
ной деформации (от степени сжатия), а, во-вторых, от соотношения радиусов
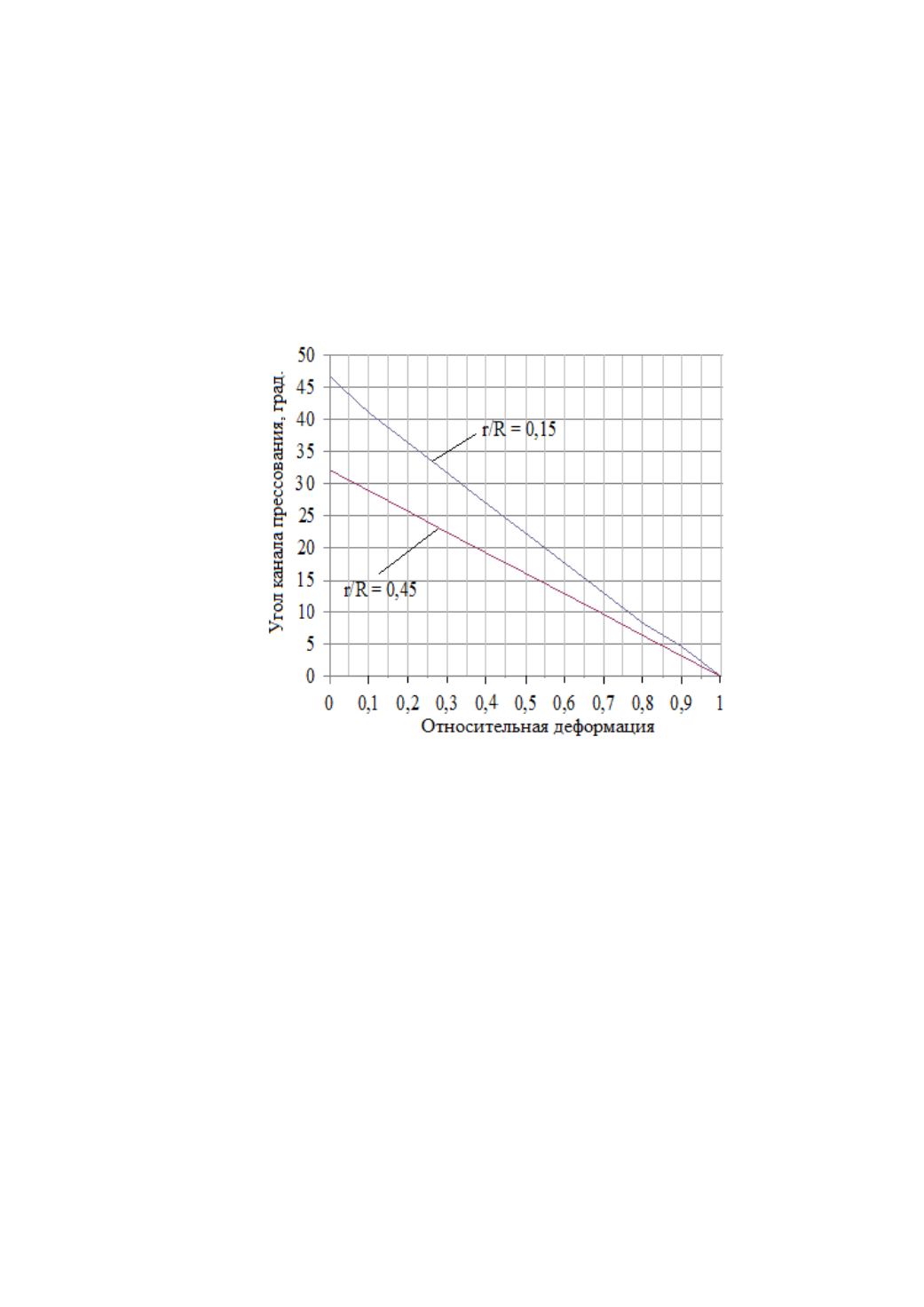
матрицы и вальца. На рисунке 5.7 приведѐн график изменения угла
γ
в зави-
симости от относительной деформации корма для соотношений радиусов
0,15 и 0,45.
Рисунок 5.7 – График зависимости угла наклона оси каналов
прессования к радиальному направлению матрицы
от относительной деформации корма в конце его сжатия
Из этих данных следует, что для прессующих вальцов с малыми радиу-
сами угол ориентации оси каналов прессования по отношению к радиально-
му направлению матрицы больше, чем для более крупных вальцов. В прессах
с малыми прессующими вальцами деформация нарастает быстрее. Однако
для видов сырья с небольшой исходной насыпной массой требуется прессо-
вание до большей относительной деформации, что приводит к уменьшению
угла отклонения оси каналов прессования от радиального направления мат-
рицы.
5.5 Анализ сил в рабочем органе и определение мощности привода
шестерѐнного пресса
Давление при сжатии кормовых смесей зависит от упруговязких
свойств среды и плотности, до которой необходимо уплотнять материал. По
[132]
Электронная Научная СельскоХозяйственная Библиотека