







 78 / 82
78 / 82

Аграрная наука Евро-Северо-Востока, № 2 (57), 2017 г.
77
тывающих виброударных механизмов наибо-
лее простыми являются предложенные нами
виброударные пружины [3].
Цель исследований
– теоретическое
обоснование параметров и режимов работы
виброударных пружин культиваторных лап.
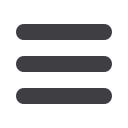
Материал и методы.
Объектом теоре-
тического исследования является конструкция
культиваторной лапы на упругой стойке с
виброударной пружиной. Предложенный ра-
бочий орган культиватора [3] включает в себя
C-образную упругую стойку 1 с лапой
2. Верхняя часть С-образной стойки выполне-
на в виде витой цилиндрической пружины 3 с
полусферическими выступами 4 на нижней
плоскости верхнего витка. На верхней плоско-
сти нижнего витка выполнены полусфериче-
ские выступы 5, а на среднем витке – полу-
сферические выступы 6 (рис. 1).
Рис. 1.
Рабочий орган культиватора
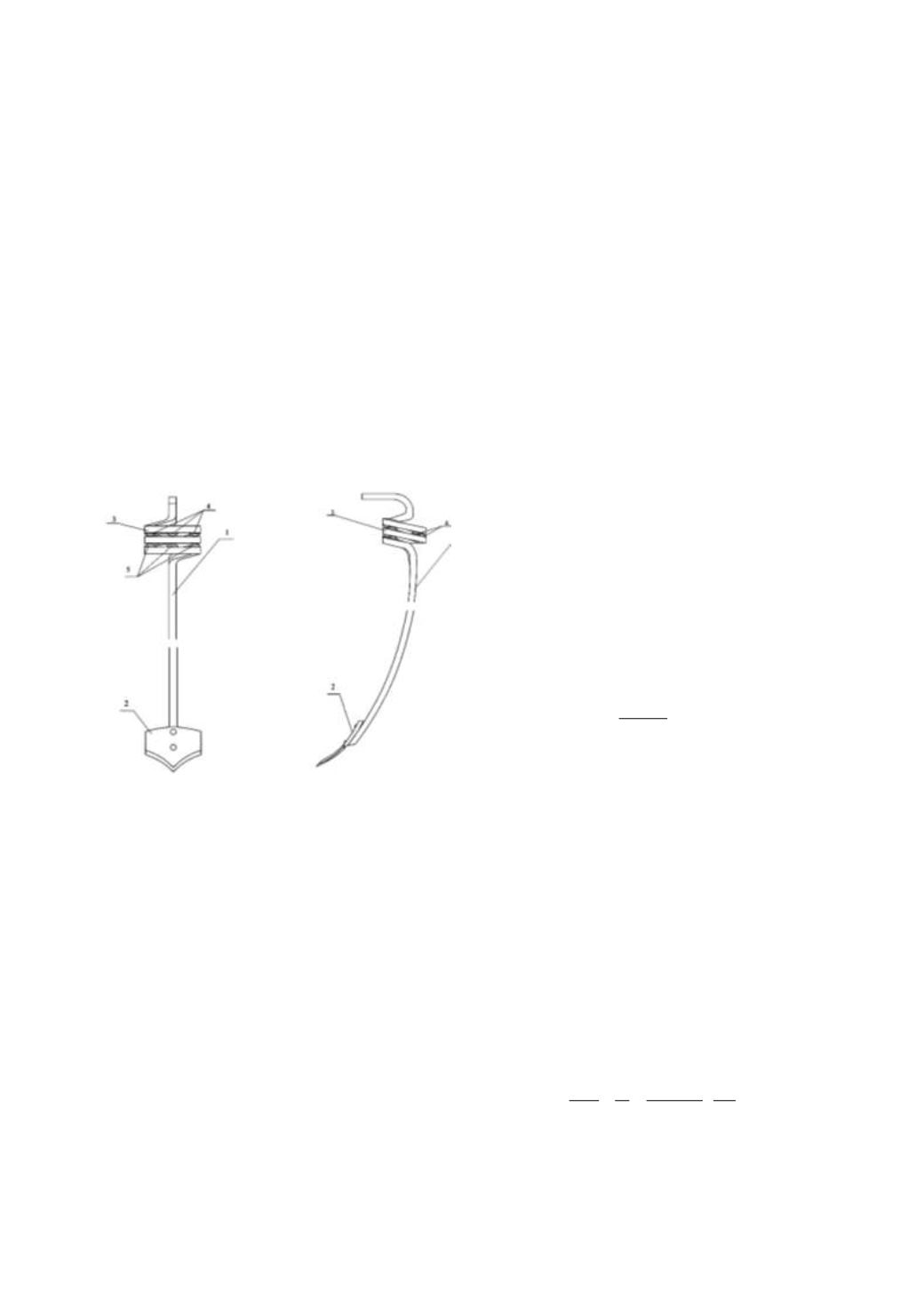
В процессе обработки почвы С-образная
упругая стойка 1 (рис. 1) за счет витой цилин-
дрической пружины 3 выполняет колебатель-
ные движения в горизонтальной плоскости
вследствие действия на лапу 2 переменной
силы сопротивления почвы. При этом обеспе-
чивается высокая надежность технологическо-
го процесса работы за счет целостности конст-
рукции стойки и, как следствие, снижение из-
гибающего момента. При периодическом уве-
личении сопротивления почвы и отклонения
С-образной стойки 1 в направлении, противо-
положном движению рабочего органа культи-
ватора, за счет полусферических выступов 6
возникает удар между ними и верхним витком.
Это обеспечивает создание ударных импуль-
сов от полусферических выступов 6, которые
передаются на С–образную стойку 1, а потом
на лапу 2. Возникает их интенсивная вибра-
ция, которая уменьшает силу трения почвы и
растительных остатков по лапе 2. Когда пре-
пятствие пройдено, С-образная стойка 1 воз-
вращается в предыдущее положение. В этот
момент полусферические выступы 4 и 5 уда-
ряют по виткам витой цилиндрической пру-
жины 3, создавая ударные импульсы, которые
передаются на С-образную стойку 1, а потом
на лапу 2 и предотвращают накопление почвы
на лапе, обеспечивая ее самоочищение. Воз-
никает автоколебательный процесс, интенсив-
ность которого зависит от физико-механи-
ческих свойств почвы и переменного тягового
сопротивления. Использование предложенно-
го рабочего органа культиватора позволит
снизить тяговое сопротивление и одновремен-
но повысит эффективность поверхностного
рыхления почвы при культивации.
При обосновании параметров конструк-
ции и режимов работы применялись методы
теоретической и земледельческой механики, ме-
ханики сплошной среды, теории упругости, ин-
тегрального и дифференциального исчисления.
Результаты и их обсуждение
.
При
обосновании параметров виброударных пру-
жин силовое воздействие рассматривалось с
учетом действующего сопротивления почвы.
В результате с учетом расчетной схемы
(рис. 2) получена зависимость для определе-
ния действующей осевой силы
Р
в виде:
R
hв
уд
Р
Р
,
(1)
где
уд
Р
– удельное сопротивление почвы;
в
– ширина захвата лапы;
h
– плечо действия
силы сопротивления почвы;
R
– радиус пружины.
Радиус полушаровых выступов на вит-
ках пружины принимаем равным радиусу по-
перечного сечения проволоки.
Под действием силы сопротивления
Р
с
культиваторной лапы на виброударную пру-
жину действует осевая сила
Р
, и виброударная
пружина испытывает сложную деформацию,
состоящую из деформации кручения под дей-
ствием крутящего момента
М
кр
=
Р·r
, и дефор-
мацию среза под действием осевой силы
Р
.
При равномерном распределении напряжений
среза по поперечному сечению наибольшее
касательное напряжение определяется по вы-
ражению:
1
2
2
r
R
Rr
hвP
Q
Р
W
М
уд
р
кр
,
(2)
где
W
p
– полярный момент сопротивления;
Q
– площадь поперечного сечения проволоки
пружины,
r
– радиус сечения проволоки пружины.
Электронная Научная СельскоХозяйственная Б блиотека